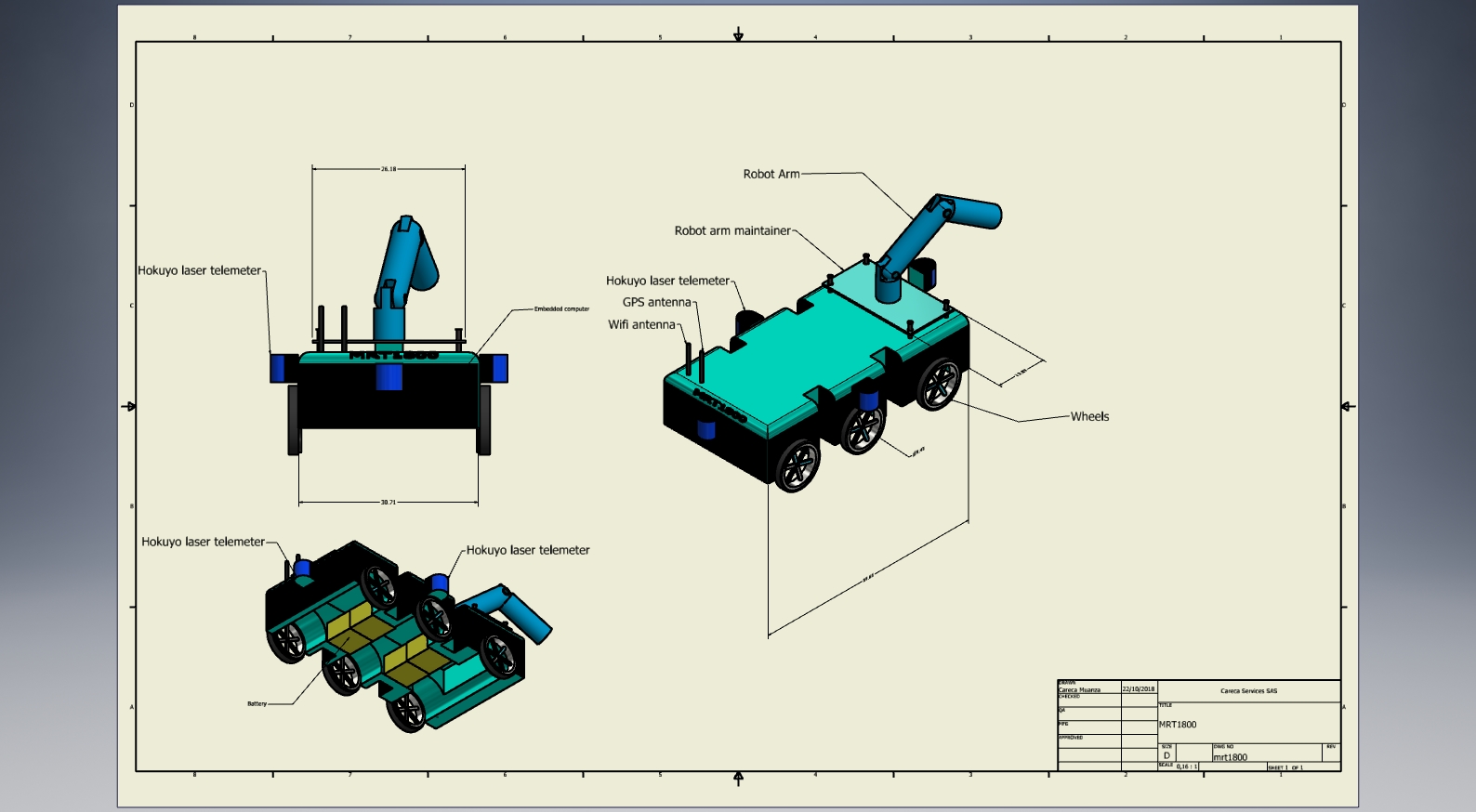
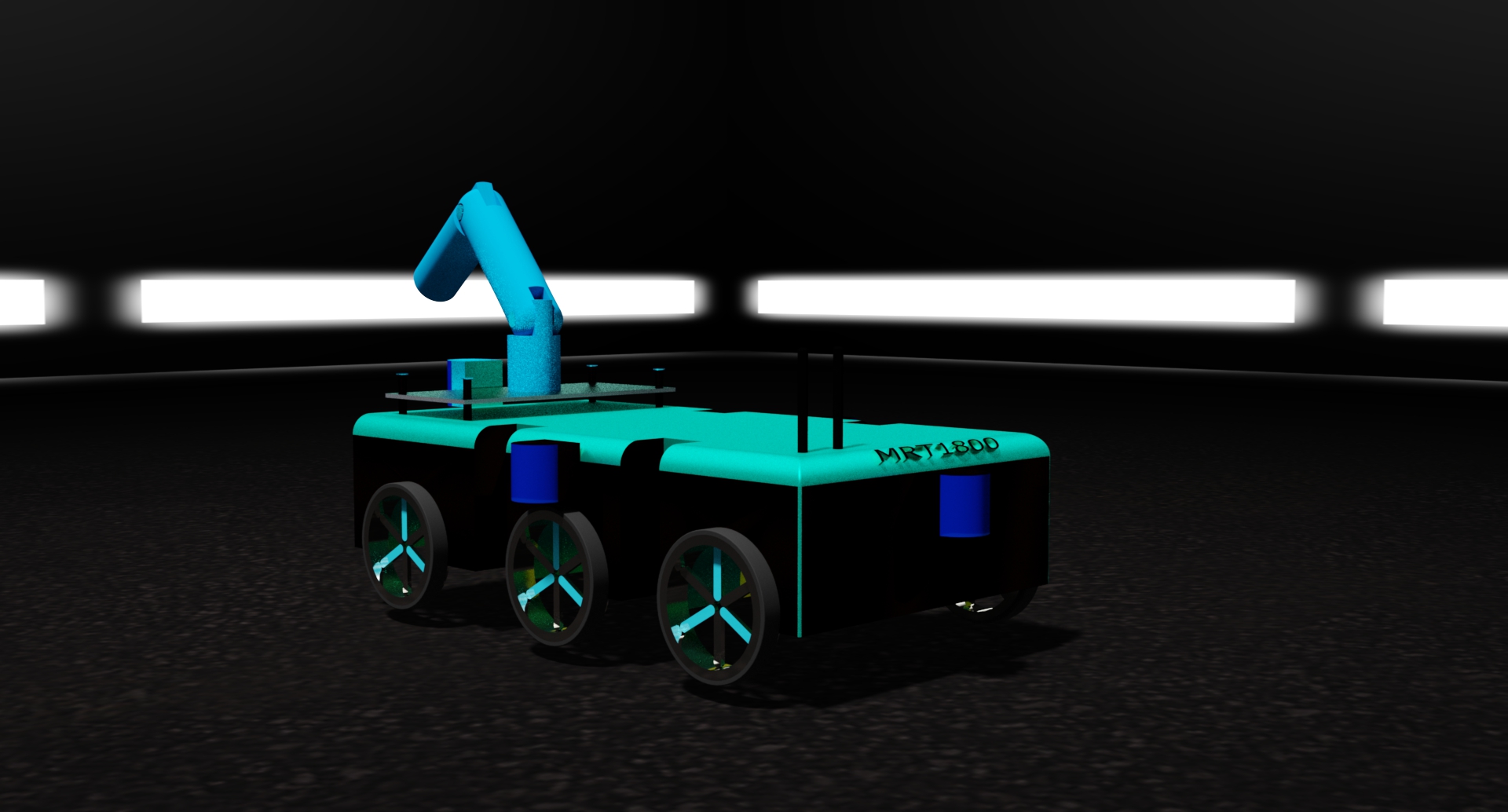
MRT1800
ASPECT GÉNÉRAL DU SUJET
Depuis les années 2000, on constate un intérêt croissant pour l’exploitation des robots dans l’industrie. On s’est rendu compte que l’utilisation de robots intelligents présentait plusieurs avantages :
- Rapidité de déploiement
- Efficacité
- minimisation des risques pour l’équipe humaine
Dans ce contexte, il y a essentiellement deux cas :
- Un ou plusieurs robots autonomes travaillant individuellement sont déployés.
- Un ou plusieurs robots autonomes travaillant individuellement sont déployés.
Dans le deuxième cas, ce qui nous intéresse pour notre projet, nous cherchons à disposer de robots capables de négocier de manière autonome des compromis à travers des structures présentant une difficulté d'émancipation (présence humaine dont l'apparition n'est pas prévisible). Nous voulons qu'ils soient capables de travailler dans un environnement environnement commun avec les humains. Nous voulons qu'ils soient conscients de leur environnement et des éléments environnants. Si nous voulons étendre cette idée, nous parlons de l’allocation dynamique des tâches au sein de l' Si nous voulons étendre cette idée, nous parlons de l’allocation dynamique des tâches au sein de la (Jérome Lacouture, José Manuel Gascuena, Marie-Pierre Gleizes, Pierre Glize , 2012) Bien que ce soit beaucoup d’avantages, c’est un système complexe. Il y a beaucoup de recherches à ce sujet.
Le robot sera composé de deux parties
Logicielle
- Plateforme Linux
- ROS (Système d’exploitation du robot)
matériel
- Ordinateur embarqué
- Modules (carte électronique)
Présentation du projet
Ce projet vise à concevoir un robot mobile avec des modules extensibles. Nous utilisons pour ce projet des connaissances en informatique, électronique, électrotechnique, automatisation et robotique.
Les objectifs fixés- Construisez un robot mobile autonome avec intelligence artificielle
- Le robot doit utiliser deux parties : logicielle (logicielle) et matérielle (matérielle) indépendantes
- Intégrez le contrôle numérique au robot pour améliorer ses performances.
- Le robot doit être conscient de son environnement grâce aux différents capteurs
- Le robot doit pouvoir transporter jusqu'à 40 kg de matériel
CEAS
Étant une entreprise d'innovation, nous concevons des logiciels et du matériel CEAS©(Careca Embedded and Automated Systems). CEAS est la marque déposée dont CSAutomatisme est l'unique propriétaire.
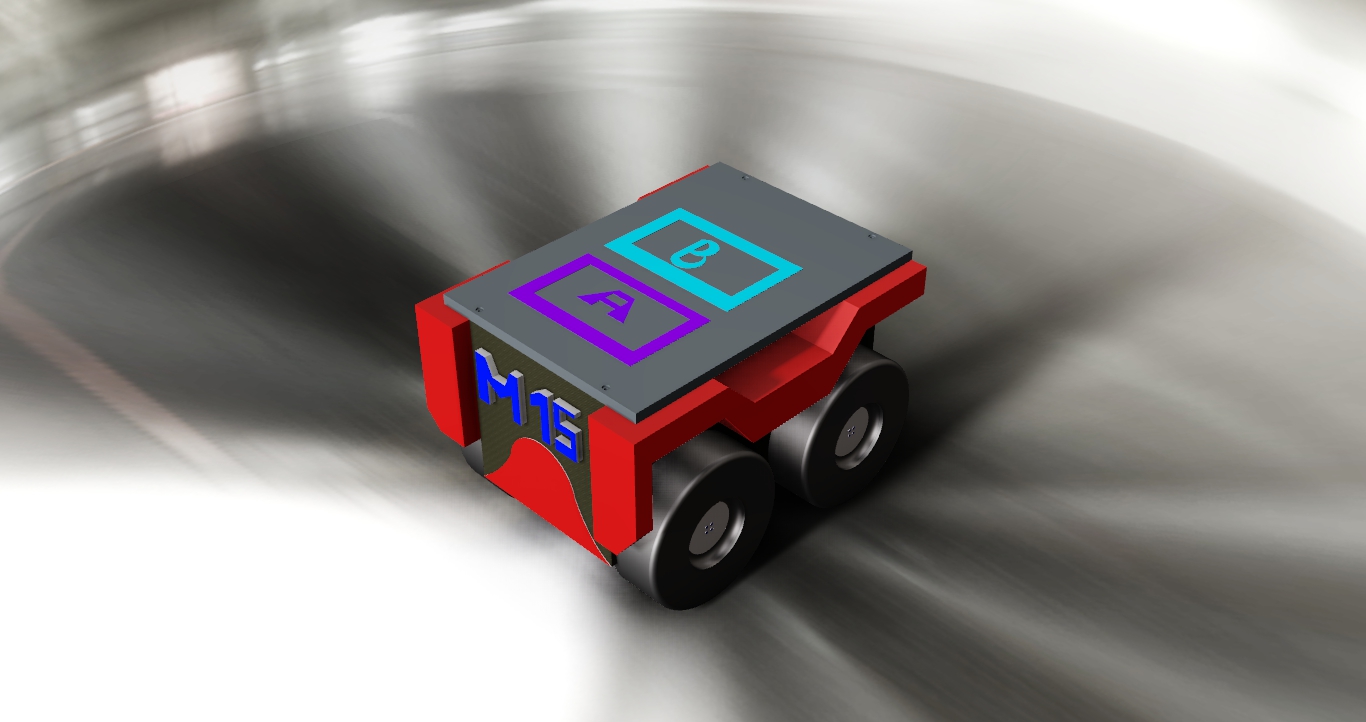
MR1500 : 2015


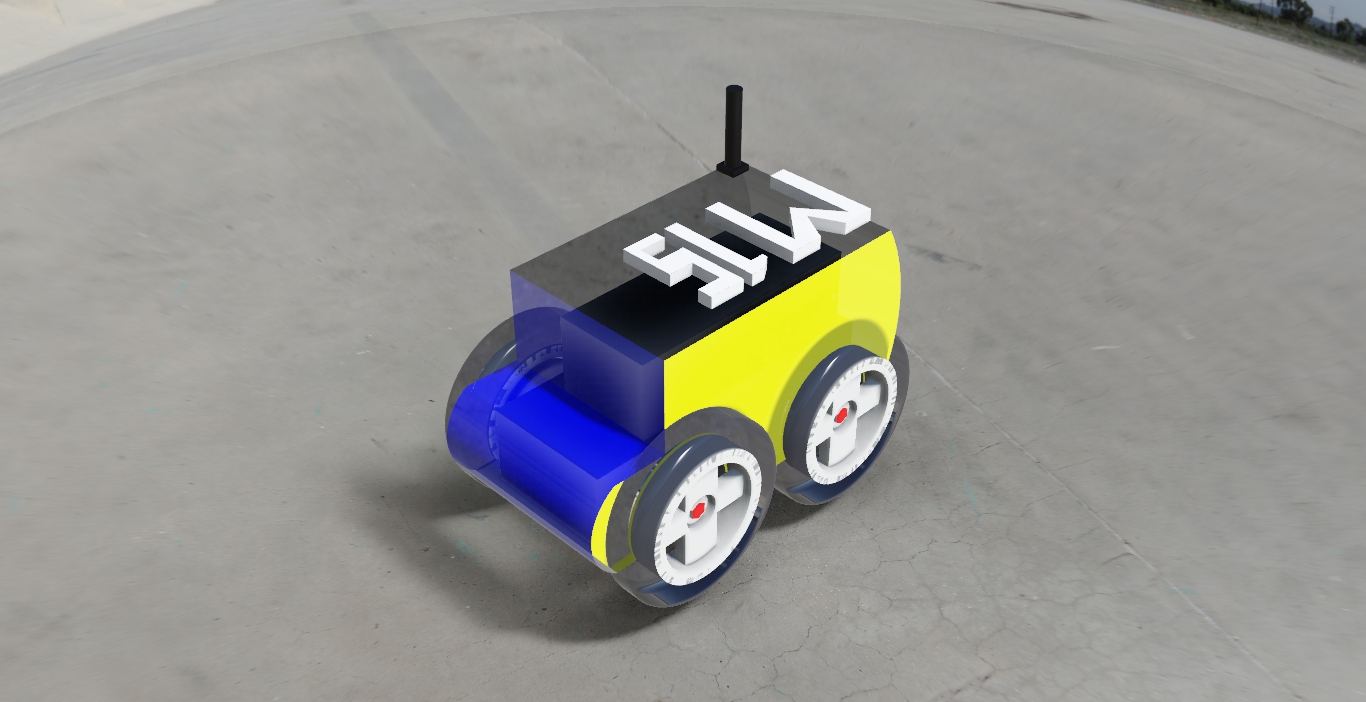
MR1500 revision 2 : 2016


MRT1800 : 2017
MRT1800 revision 2 : 2018